And Control Systems Course Syllabus 2012-2013 4h5i1r
This document was ed by and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this report form. Report 445h4w
Overview 1s532p
& View And Control Systems Course Syllabus 2012-2013 as PDF for free.
More details 6h715l
- Words: 746
- Pages: 5
ECE 443 – CONTROL SYSTEM
TECHNOLOGICAL UNIVERSITY OF THE PHILIPPINES COURSE SYLLABUS AY 2013 – 2014 COLLEGE: College of Engineering DEPARTMENT: Electronics Engineering COURSE CODE: ECE 2 COURSE TITLE: Control System PREREQUISITE: Math 7/EE 2 PREREQUISITE TO: N.A. Co-REQUISITE: N.A. TYPE OF COURSE: Lecture CREDIT UNITS: 3 units TERM/DAY/TIME/ROOM: _________________________________ INSTRUCTOR: Engr. Edmon O. Fernandez DEPARTMENT CHAIR: Engr. August C. Thio-ac COURSE DESCRIPTION: The course starts with control system definition and its classifications, the application of the Laplace transform in evaluating system response, and the various system representations. It also covers root locus techniques, bode plot analysis, nyquist criterion, sensitivity and stability criteria. COURSE OBJECTIVES: At the end of the term, the students shall be able to: COGNITIVE 1. Represent various and systems in its Laplace transform and state-space. 2. Differentiate an open-loop from close-loop control system. 3. Analyze the characteristics of a system through its response. AFFECTIVE 4. Appreciate the use of Laplace transform in deg a control system. 5. Show how the right approach in system design results to stable systems. PSYCHOMOTOR 6. Apply mathematical modeling techniques in deg a control system. 7. Tabulate poles and zeros of a system transfer function. 8. Design a stable system. COURSE FORMAT: Professor facilitated lecture-discussion Prepared by: Engr Edmon O. Fernandez
Noted by: Engr. August C. Thio-ac
ECE 443 – CONTROL SYSTEM
Conversations and Privilege Hours Paper presentations; showing the wide research / readings of the students on the topic by quoting varied authors, not only one text book Focus group discussions Recitation and Examination GRADING SYSTEM: PRELIM
MIDTERM
FINAL
Quiz Examination Class Standing 1. Attendance 2. Assignments 3. Recitation 4. Seatwork
35% 35% 5% 10% 5% 10% TOTAL 100% 35% 35%
Quiz Examination Class Standing 5. Attendance 6. Assignments 7. Recitation 8. Seatwork
5% 10% 5% 10% TOTAL 100% 35% 35%
Quiz Examination Class Standing 9. Attendance 10. Assignments 11. Recitation 12. Seatwork
5% 10% 5% 10% TOTAL 100%
LEARNING PLAN: WEE K
SESSI ON
OBJECTIVES
Prepared by: Engr Edmon O. Fernandez
PRELIM TOPICS Noted by: Engr. August C. Thio-ac
TEACHING AID
NO. OF
TEACHING METHODOLOGY
ECE 443 – CONTROL SYSTEM
1
1 2
2
3
3
4 5
4
6 7
Define control system and explain its applications Differentiate an open-loop from a close-loop system Discuss controllable system requirements
9
6
10 11
WEE K
SESSI ON
7
13
Hand-outs Hand-outs
3
On-theboard problem solving
4.5
Inverse Laplace transform Transfer function Represent mathematical model for each system
8 5
Introduction to control system Response characteristics and system configuration Analysis and design objectives Laplace transform review
HOU RS 1.5
Electric network transfer function
On-theboard problem solving
Translational mechanical system Rotational mechanical system System with gears
OBJECTIVES
Represent mathematical model each system
14 Prepared by: Engr Edmon O. Fernandez
MIDTERM TOPICS
6 7.5
Seatwork
9 10.5
Seatwork
12
TEACHING AID
13.5
Recitation
15 16.5
Quiz#1
Electromechanical system
Hand-outs
NO. OF HOU RS 19.5
Electric circuit analogs
Hand-outs
21
Noted by: Engr. August C. Thio-ac
Lecture/discussi on
TEACHING METHODOLOGY Lecture/discussi on
ECE 443 – CONTROL SYSTEM
8 9
15 16 17
Represent systems in vector-matrix form Convert system in matrix form to a mathematical model
18 10
19
Identify the characteristics of various system response
20 11
21
12
22 23 24
WEE K
SESSI ON
13
25
14
26 27 28
15
29 30
16
Reduce multiple subsystems for simpler analysis
Linearization State-space representation State-space to transferfunction Transfer function to statespace First-order system response Second-order system response Multiple subsystems reduction Mason’s rule Midterm exam Solution to midterm exam FINALS TOPICS
OBJECTIVES
Determine the system stability
Routh-Hurwitz criterion
Sketch a root locus
Root locus techniques
Use root locus to find poles for closed-loop system Plot frequency response
Prepared by: Engr Edmon O. Fernandez
22.5 24 25.5
Hand-outs
On-the-board solution Seatwork
27 28.5
Seatwork
30 Hand-outs
31.5
Lecture/discussi on
33 34.5 36 TEACHING AID Hand-outs
NO. OF HOU RS 37.5
Hand-outs
39 40.5
TEACHING METHODOLOGY Lecture/discussi on Lecture/discussi on
42 Frequency response techniques
Use frequency response to analyze stability
31 32
Hand-outs Hand-outs
Hand-outs
43.5 45
Quiz#2 Solution to Quiz#2 Noted by: Engr. August C. Thio-ac
46.5 48
Seatwork
ECE 443 – CONTROL SYSTEM
17
33
18
34 35 36
Find steady-state error for a unity system
Steady-state errors Final exam
TEXTBOOK: Norman s. Nice. Control Systems Engineering (4th Edition). Robert Schaum. Control System. Dorf. Modern Control System.
Prepared by: Engr Edmon O. Fernandez
Noted by: Engr. August C. Thio-ac
Hand-outs
49.5 51 52.5 54
Lecture/discussi on
TECHNOLOGICAL UNIVERSITY OF THE PHILIPPINES COURSE SYLLABUS AY 2013 – 2014 COLLEGE: College of Engineering DEPARTMENT: Electronics Engineering COURSE CODE: ECE 2 COURSE TITLE: Control System PREREQUISITE: Math 7/EE 2 PREREQUISITE TO: N.A. Co-REQUISITE: N.A. TYPE OF COURSE: Lecture CREDIT UNITS: 3 units TERM/DAY/TIME/ROOM: _________________________________ INSTRUCTOR: Engr. Edmon O. Fernandez DEPARTMENT CHAIR: Engr. August C. Thio-ac COURSE DESCRIPTION: The course starts with control system definition and its classifications, the application of the Laplace transform in evaluating system response, and the various system representations. It also covers root locus techniques, bode plot analysis, nyquist criterion, sensitivity and stability criteria. COURSE OBJECTIVES: At the end of the term, the students shall be able to: COGNITIVE 1. Represent various and systems in its Laplace transform and state-space. 2. Differentiate an open-loop from close-loop control system. 3. Analyze the characteristics of a system through its response. AFFECTIVE 4. Appreciate the use of Laplace transform in deg a control system. 5. Show how the right approach in system design results to stable systems. PSYCHOMOTOR 6. Apply mathematical modeling techniques in deg a control system. 7. Tabulate poles and zeros of a system transfer function. 8. Design a stable system. COURSE FORMAT: Professor facilitated lecture-discussion Prepared by: Engr Edmon O. Fernandez
Noted by: Engr. August C. Thio-ac
ECE 443 – CONTROL SYSTEM
Conversations and Privilege Hours Paper presentations; showing the wide research / readings of the students on the topic by quoting varied authors, not only one text book Focus group discussions Recitation and Examination GRADING SYSTEM: PRELIM
MIDTERM
FINAL
Quiz Examination Class Standing 1. Attendance 2. Assignments 3. Recitation 4. Seatwork
35% 35% 5% 10% 5% 10% TOTAL 100% 35% 35%
Quiz Examination Class Standing 5. Attendance 6. Assignments 7. Recitation 8. Seatwork
5% 10% 5% 10% TOTAL 100% 35% 35%
Quiz Examination Class Standing 9. Attendance 10. Assignments 11. Recitation 12. Seatwork
5% 10% 5% 10% TOTAL 100%
LEARNING PLAN: WEE K
SESSI ON
OBJECTIVES
Prepared by: Engr Edmon O. Fernandez
PRELIM TOPICS Noted by: Engr. August C. Thio-ac
TEACHING AID
NO. OF
TEACHING METHODOLOGY
ECE 443 – CONTROL SYSTEM
1
1 2
2
3
3
4 5
4
6 7
Define control system and explain its applications Differentiate an open-loop from a close-loop system Discuss controllable system requirements
9
6
10 11
WEE K
SESSI ON
7
13
Hand-outs Hand-outs
3
On-theboard problem solving
4.5
Inverse Laplace transform Transfer function Represent mathematical model for each system
8 5
Introduction to control system Response characteristics and system configuration Analysis and design objectives Laplace transform review
HOU RS 1.5
Electric network transfer function
On-theboard problem solving
Translational mechanical system Rotational mechanical system System with gears
OBJECTIVES
Represent mathematical model each system
14 Prepared by: Engr Edmon O. Fernandez
MIDTERM TOPICS
6 7.5
Seatwork
9 10.5
Seatwork
12
TEACHING AID
13.5
Recitation
15 16.5
Quiz#1
Electromechanical system
Hand-outs
NO. OF HOU RS 19.5
Electric circuit analogs
Hand-outs
21
Noted by: Engr. August C. Thio-ac
Lecture/discussi on
TEACHING METHODOLOGY Lecture/discussi on
ECE 443 – CONTROL SYSTEM
8 9
15 16 17
Represent systems in vector-matrix form Convert system in matrix form to a mathematical model
18 10
19
Identify the characteristics of various system response
20 11
21
12
22 23 24
WEE K
SESSI ON
13
25
14
26 27 28
15
29 30
16
Reduce multiple subsystems for simpler analysis
Linearization State-space representation State-space to transferfunction Transfer function to statespace First-order system response Second-order system response Multiple subsystems reduction Mason’s rule Midterm exam Solution to midterm exam FINALS TOPICS
OBJECTIVES
Determine the system stability
Routh-Hurwitz criterion
Sketch a root locus
Root locus techniques
Use root locus to find poles for closed-loop system Plot frequency response
Prepared by: Engr Edmon O. Fernandez
22.5 24 25.5
Hand-outs
On-the-board solution Seatwork
27 28.5
Seatwork
30 Hand-outs
31.5
Lecture/discussi on
33 34.5 36 TEACHING AID Hand-outs
NO. OF HOU RS 37.5
Hand-outs
39 40.5
TEACHING METHODOLOGY Lecture/discussi on Lecture/discussi on
42 Frequency response techniques
Use frequency response to analyze stability
31 32
Hand-outs Hand-outs
Hand-outs
43.5 45
Quiz#2 Solution to Quiz#2 Noted by: Engr. August C. Thio-ac
46.5 48
Seatwork
ECE 443 – CONTROL SYSTEM
17
33
18
34 35 36
Find steady-state error for a unity system
Steady-state errors Final exam
TEXTBOOK: Norman s. Nice. Control Systems Engineering (4th Edition). Robert Schaum. Control System. Dorf. Modern Control System.
Prepared by: Engr Edmon O. Fernandez
Noted by: Engr. August C. Thio-ac
Hand-outs
49.5 51 52.5 54
Lecture/discussi on
Related Documents 2w1qw

And Control Systems Course Syllabus 2012-2013 4h5i1r
December 2019 35
Control Of Dynamic Systems 523438
December 2019 102
Loops And Information Systems v3d4k
November 2019 32
A Course In Fuzzy Systems And Control 5af4r
November 2019 24
A Course In Fuzzy Systems And Control 5af4r
December 2019 77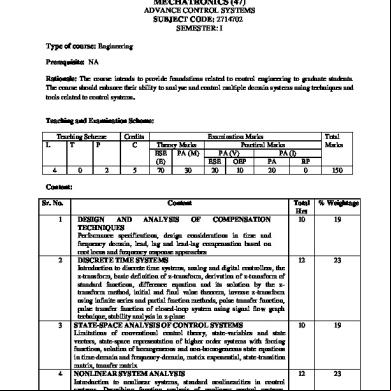
2714702 Advanced Control Systems Syllabus c1ho
December 2019 41More Documents from "Myca Mira" 1p2s6v

Energy Conversion Dynamo 4j1su
December 2019 54
And Control Systems Course Syllabus 2012-2013 4h5i1r
December 2019 35
Drb_lecture_kinematics Of Curvilinear Translation j5j4a
December 2019 58
The Evolution Of The Motorola Microprocessor 543x3i
October 2021 0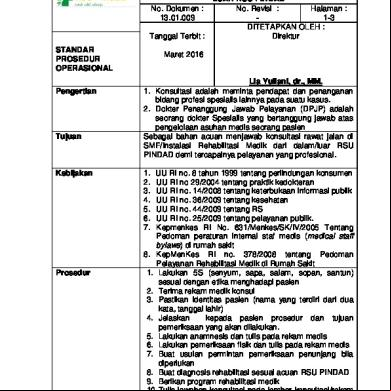
Sop Rehabilitasi Medik.docx 5m6k
April 2020 26